第三章 索引
索引结构基础
索引的数据文件, 必须建立索引和记录之间的关联, 索引的指针指向的记录必须含索引对应的值。
索引如果是稠密的, 则为每个记录设一个索引。
当索引是稀疏的, 则需要主索引和辅助索引。
顺序文件
按照主键进行排序生成的文件。 表中的元祖按照这个次序分布在多个数据块中。
稠密索引
当索引文件索引块保持键的顺序和数据文件中排序一直。 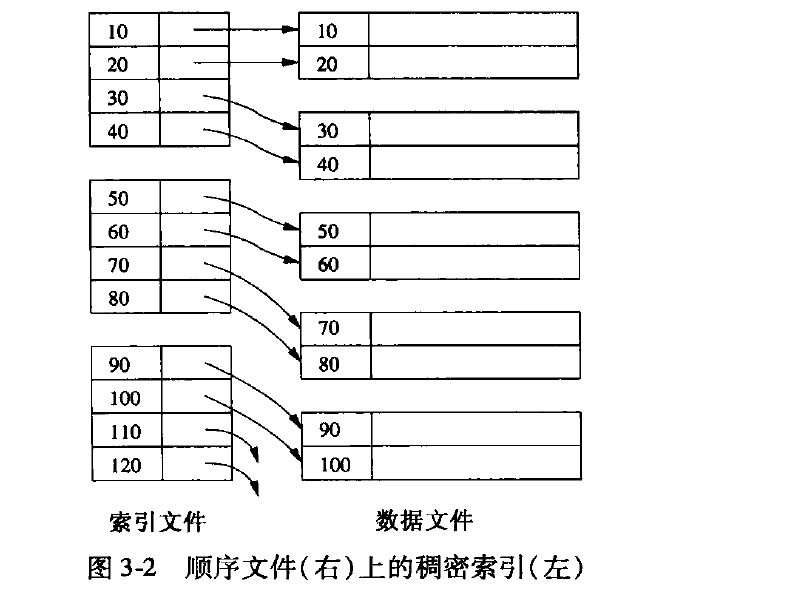
这种方式, 因为索引是排序的,可以用二分查找来加速查找, 另外, 因为索引的数据量小,可以完全被load到内存中。
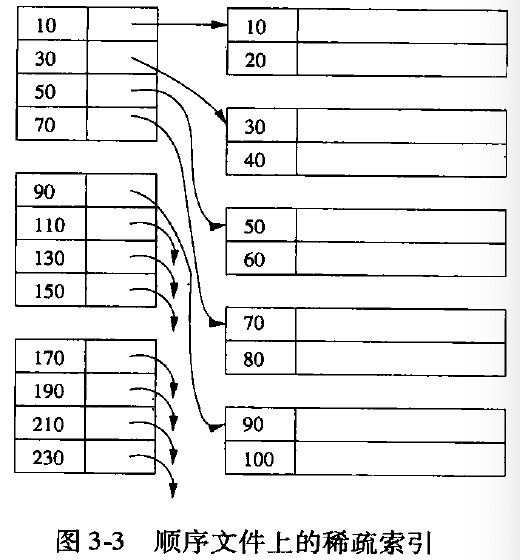
稀疏索引
多级索引
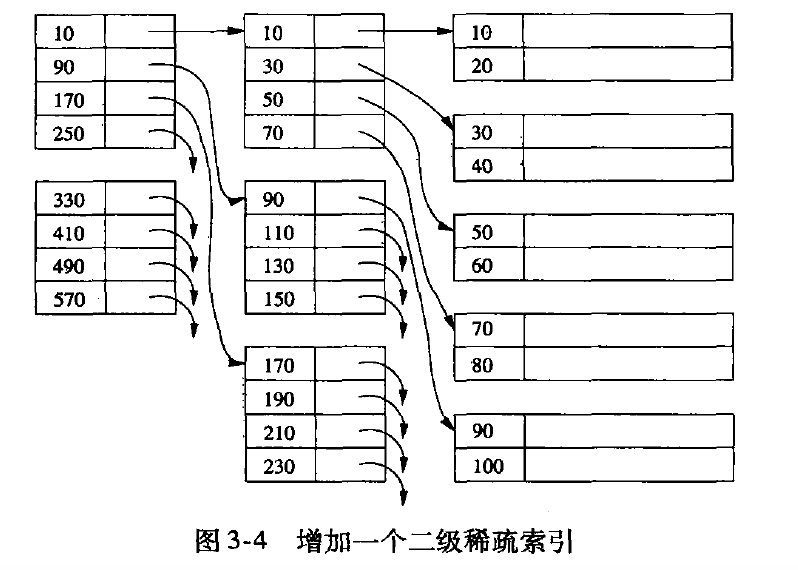
类似上图, 但多级索引效率依旧比较低,因此更常规的做法是使用b+树。
辅助索引(非主键索引)
辅助索引表示索引键的排序和数据文件的排序是不同的, 因此必须是稠密索引, 因此稀疏索引是毫无意义。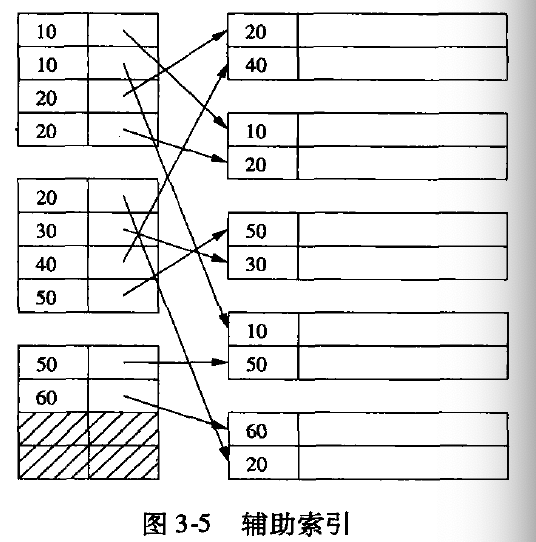
因为索引键非唯一性, 因此,对一个值进行查找时, 可能还是会查找多个数据文件的块。
辅助索引一种用途就是做聚集文件, 比如表r 和s, r 中多条记录对于s中一条记录。
比如

基于studioname 和pressc# 建立一个聚集文件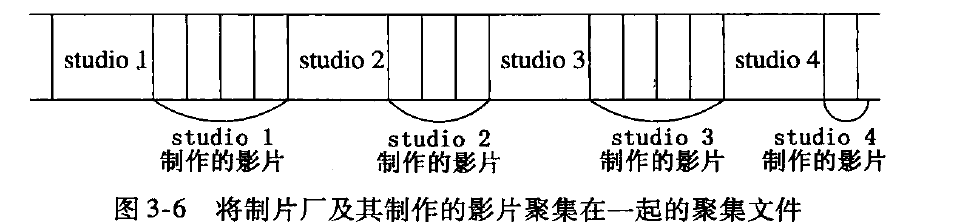
辅助索引的间接层
当辅助索引重复率非常高时, 索引文件的效率比较低,可以引入一个间接索引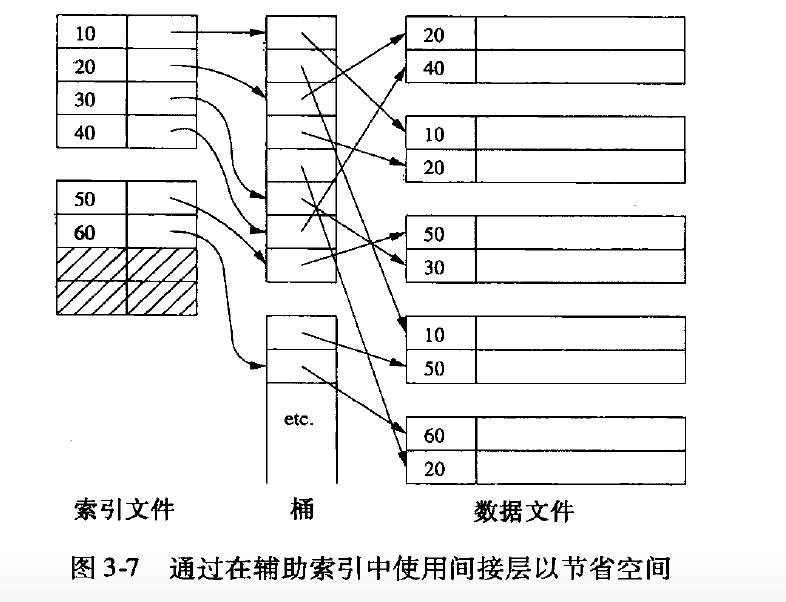
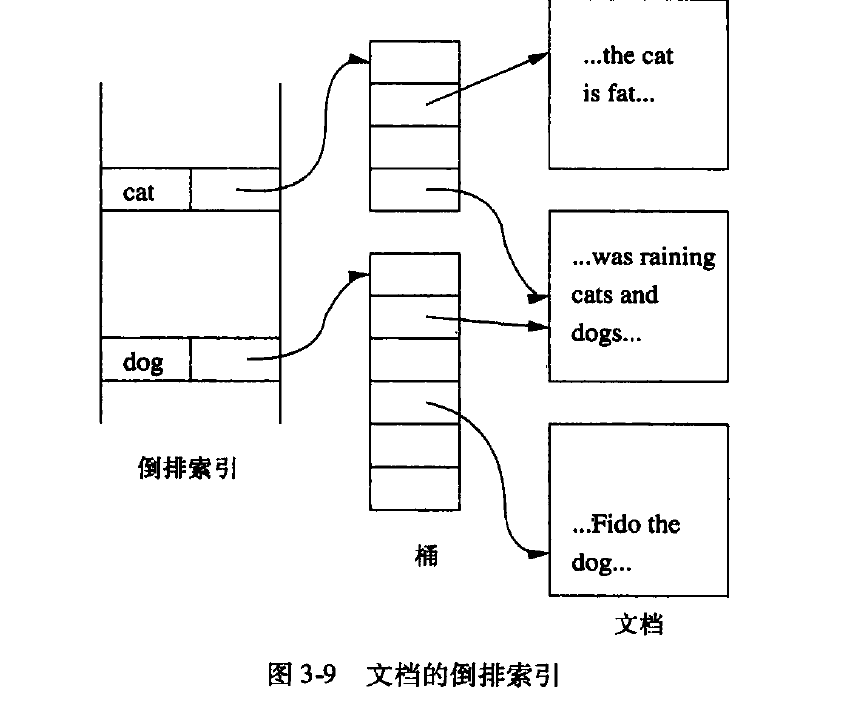
倒排索引
- 一个文档可以被看作是doc 的一个元组
- 每个元组类似doc(hascat, hasdog, hascar…), 每个属性表示文档含有该关键字
- 关系doc 上为每个属性建立一个辅助索引, 只需为出现该关键字的文档建索引
- 不是为每个属性建一个索引,而是把所有的索引合成一个,称为倒排索引。
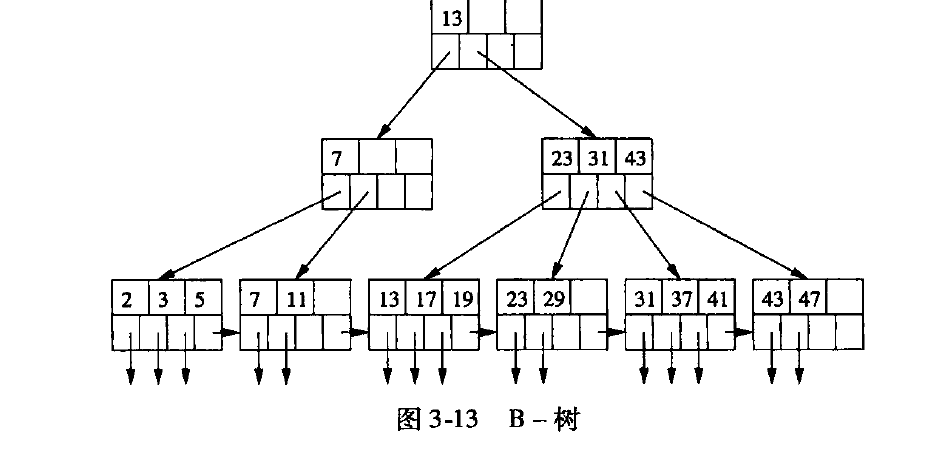
b- 树
- 平衡二叉树, 每个块都处在半满和全满之间
- 根, 至少被2个节点使用
- 叶节点中, 最后一个指针指向下一个叶节点的存储块
- 内层节点, 含有n+1个指针指向下一层的块, 摒弃[(n+1)/2] 个指针被使用了。 如果含有j个指针,则含有j-1个键, 为k1, k2, k3, …, k(j-1). 第一个指针指向小于k1的块, 第二个指针指向k1《=v 《 k2
- 所有的键和指针,存放在数据块的头部。
- b- 树是数据文件的主键, 索引是稠密的, 数据文件可以不按主键排序
- 当数据文件按主键排序,且b+树是稀疏索引, 则叶节点为数据文件每一个块设一个键-指针对
- 当数据文件按主键排序,但b+ 树属性非主键。 则索引是稠密的,叶节点为每个属性都设置键-指针对,k指向第一个记录。
- b-树可扩展带重复。
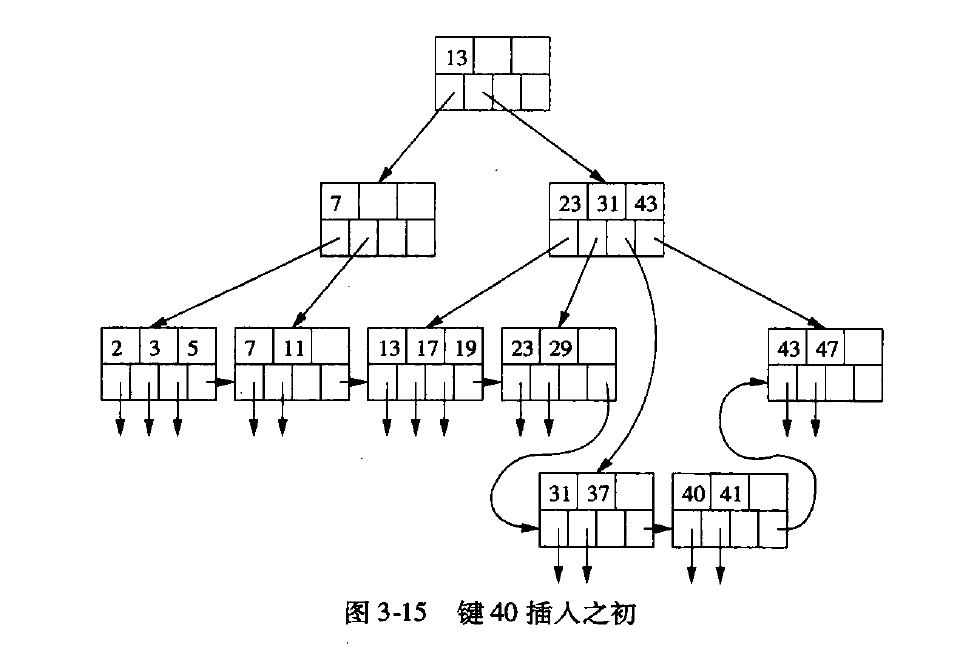
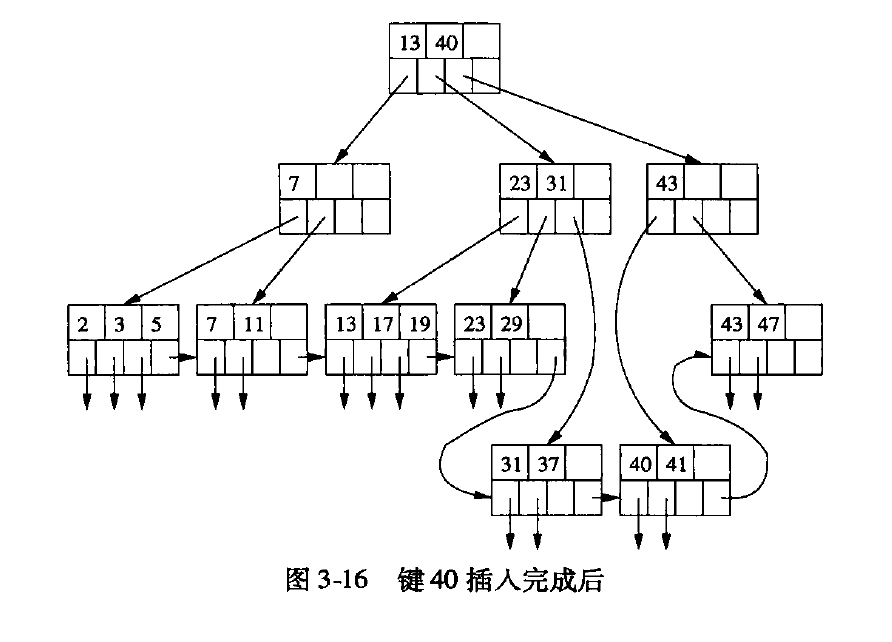
插入
- 在合适的节点中找空间,如果节点有空间,则放入到该节点。
- 如果合适节点没有空间, 将合适节点分裂为2个新节点, 将键分到2个新节点, 2个新节点满足有一半或超过一半的键。
- 对于刚才分裂的节点的上一层来说,就相当于在上一层新增节点, 重复上一层的插入操作,直到根节点。
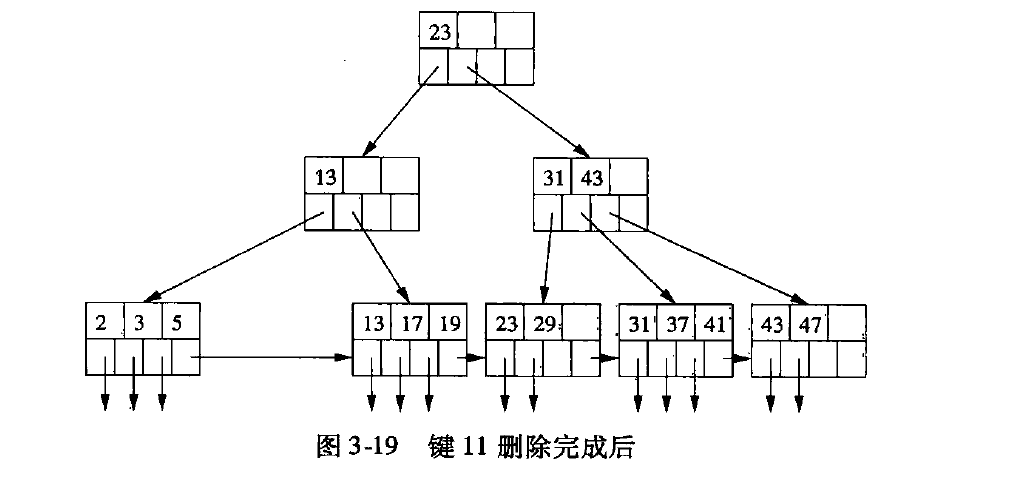
删除
- 如果删除键的节点,删除后 键还是超过最小要求,则直接删除, 不做合并操作
- 如果删除键的节点n 的邻居节点m(是他的兄弟节点, 同一个父节点下的其他的相邻节点),可以拆一个节点过来, 则拆解一个节点过来, 并更新他们共同的父节点
- 如果n节点的相邻节点都是最小要求, 则n节点和一个相邻节点进行合并。 然后对他们的父节点进行一个删除键操作, 重复上叙过程,直到完成删除动作。
对图3-13 进行删除7操作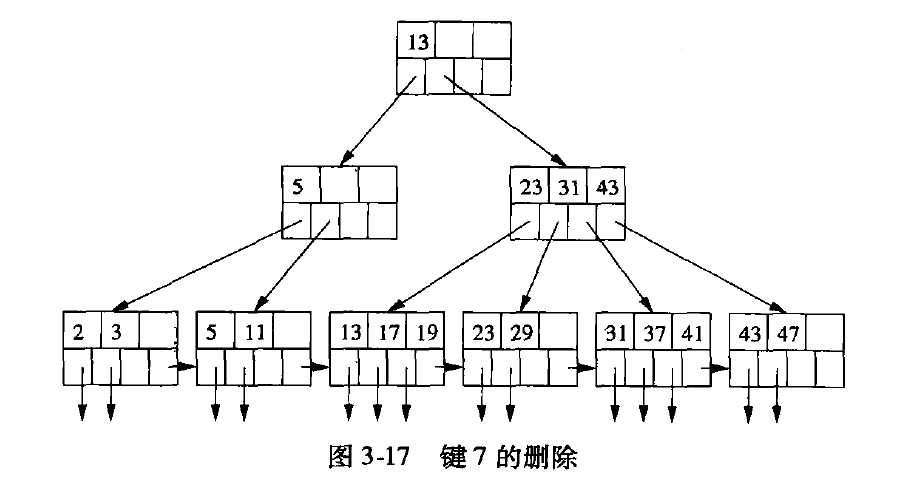
对图3-17 进行删除11的操作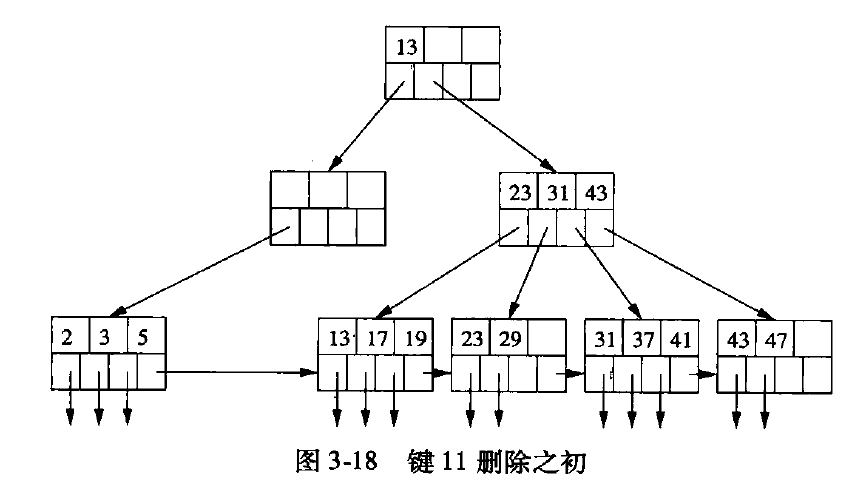
效率分析
如果每个节点容纳的键比较多, 则分裂和合并的操作就会比较少。
访问效率, i/o效率是树的深度 + 1次(查找) /2次(插入或删除)。
优化手段
- 一些b-树,删除时,并不会立刻做平衡树调整, 它会相信马上就会添加数据让它平衡, 或者大部分树发展比较平衡,节点比较多,删除不会立刻破坏平衡性。
hash 表
通过一个hash 函数,将键 hash到一个含有b个桶的hash 表中, hash表可能每个指针,指向一个链表
通常算法是hash(k)%b, b 通常是一个素数, 素数更有利于hash后值平均分布。
适合冲突比较少的算法, 另外不适合范围查找。
动态hash表
在静态hash表的基础上,增加
- 增加一个中间层, 中间层存放指针,中间层是一个指针数组
- 指针数组长度是2的幂, 当增长时, 数组长度就翻倍
动态hash 表的插入
- 插入一个值到目标块中, 如果目标块可存放, 则ok
- 当目标块溢出时, 对目标块进行分裂, 取hash值后的第n位做判断位,为0, 保留在老块中,为1放到新块中。将中间层的指针重新指向新块
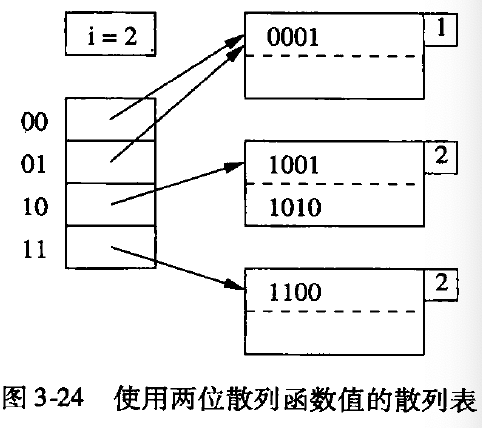
- 缺点: 分裂的代价比较重
linear hash table
介绍
- p: 平均每个桶能装的元素个数, 固定值
- e: 取hash值的e位来有效
- r: 实际元素个数
- n: 桶个数
原则:
- r/n <= p, 不符合时, 增加n
- 2^(e -1) <= n < 2^e
hash表中,每个元素为(hash, key, value)
hash = hash(key) & (2^e - 1)
插入时:
- 当hash 值< n 时, 直接放入hash 对应的桶中
- 当hash 值>= n 时, hash = hash(key)& (2^ (e -1) - 1), 放入对应的桶中。
当插入值后, 因为r在增加, 可以会破坏原则:
- r/n < = p, 增加n
- 当n增加后,如果破坏了原则 2^(e -1) <= n < 2^e, 则增加e
- 当e增加后, 找个空闲的时间,可以rehash一下, 对原来老的一些桶内的数据,从老的桶内挪到新的桶内。
多维索引
hash 结构
一种方式是使用网格文件(grid file), 每一维上把空间分成条状, 按照空间2维进行组队。 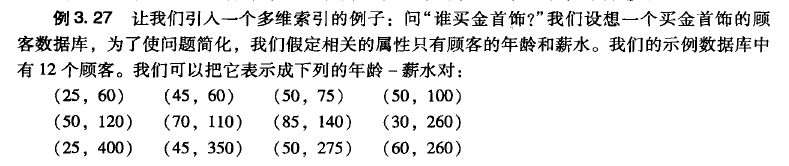
hash 结构的设计, 我觉得场景不多, 实现的效率不高, 不仔细研究了
多维树结构
- 多键索引
- kd树
- 四叉树
- r-树
多键索引
每一层是某一个索引,下一层是另外一个索引, 2个索引相互嵌套。 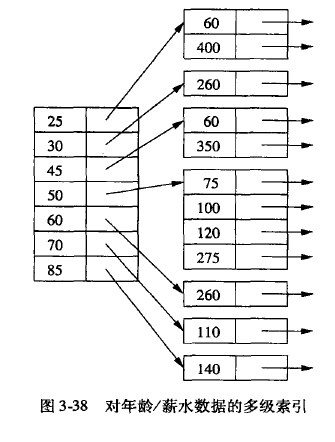
kd 树
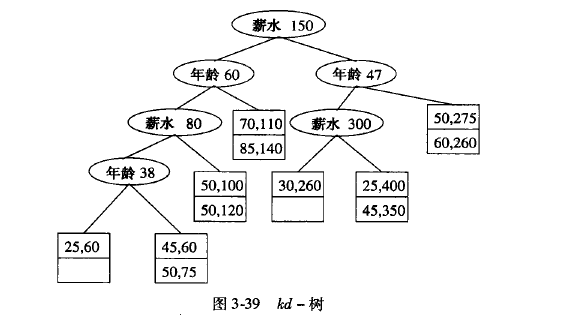
每一层都是一个索引, 每个节点都是一个值, 然后以这个值做搜索, 大于的往左边,小于的往右边,这样自动进行切分
四叉树
四叉树是2叉树的一种变种, 每个节点是一个二维的节点, 他的4个子节点代表着4个方向。 
如果支持3维, 则变成8叉树。 他不是一种平衡树。
R 树
r树 是一种高维空间索引, 基于B树的衍生树, 是一种平衡树。 是使用非常多的一种多维空间索引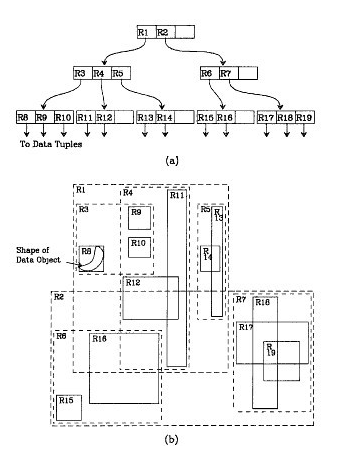
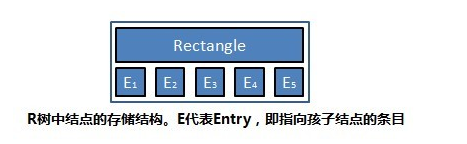
每一个节点都是一个小小的rectangle, 他的父节点就是下面几个rectangle组成起来的一个大的rectangle, 相邻的几个小rectangle合起来组成一个大的rectangle。 一个rectangle就是一个记录
原则:
- 除了根节点, 所有的节点至少m个rectangle, 最多M个rectangle, m=M/2, m<=n< M。
- 除了根节点, 他最多m<=n<M个指针,指向下一层节点
- 所有叶子位于同一层
- 叶子节点的记录是最小rectangle, 他的父节点同样是最小rectangle
- 叶子节点结构
搜索的时候, 有一点像地图搜索, 比如,搜索杭州, 找到杭州这个rectangle, 搜索西湖区, 找到西湖区这个rectangle, 一层一层往下分解, 如果跨节点,则进行拆分。
位图索引
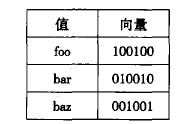
位图索引, 很多时候, 都是表示这个记录在某个位置是否出现, 尤其是在一些readonly的存储上非常有用,常常标识记录是否被删除。
举个例子
压缩位图
可以用很多算法来对位图进行压缩。
一种思路是进行分段长度编码, 